QGroundControl一款由dronecode而制作的地面站软件,也可以直接叫QGC地面站。专用于PX4、PIXHAWK开源无人机飞控系统。帮助无人机提供飞行控制以及人物规划等等。主要目标是首次使用和专业用户。支持多个平台运行例如Windows,OS X,Linux,iOS和Android。通过飞行堆栈讨论服务器和gitter提供支持。简单的用户和开发人员文档使QGroundControl易于使用和自定义。还有为ArduPilot或PX4 Pro动力车辆提供配置。并且可以下载原生的PX4/PIXHAWK固件,体验新一代的开源飞控。提供地图功能,可以在软件直接查看地面站的信息。想比同行软件更好接收数据,可以更好查看无人机传输的内容。可以在地图上显示当前飞行的速度,可以控制飞行路线。支持每次飞行后保存遥测日志,将飞行数据自动保存。支持下次启动时清除所有设置,更好重置新的飞行数据。小编带来的是QGroundControl汉化版,专门为方便国人使用!
软件功能
1、可以在软件配置无人机,可以对设备的飞行方案配置
2、提供地图功能,可以在软件直接查看地面站的信息
3、可以通过这款软件将无人机拍摄的数据发送到地面站
4、可以有更好接收数据,可以更好查看无人机传输的内容
5、支持地图查看,可以将离线地图加载到软件查看航线
6、支持放大地图,航拍的地图可以在软件放大查看
7、支持对飞行的任务设置,可以通过本软件规划你的飞行任务
8、QGroundControl可以在地图上显示当前飞行的速度,可以控制飞行路线
9、支持返航设置,直接在软件上控制飞行器返航
软件特色
1、一款专业的地面站软件。
2、为任何支持MAVLink的无人机提供全面的飞行控制和任务规划。
3、为ArduPilot或PX4 Pro动力车辆提供配置。
4、主要目标是首次使用和专业用户。
5、在Windows,OS X,Linux,iOS和Android上运行。
6、所有代码都是开源代码,因此您可以根据需要进行贡献和发展。
7、通过飞行堆栈讨论服务器和gitter提供支持。
8、源代码存储在Github中。
9、简单的用户和开发人员文档使QGroundControl易于使用和自定义。

使用教程
一、固件刷新
1、首先确认你的是飞控是PX4或者是PIXHAWK 什么版本都行。然后在比克尔下载QGroundControl并安装好。
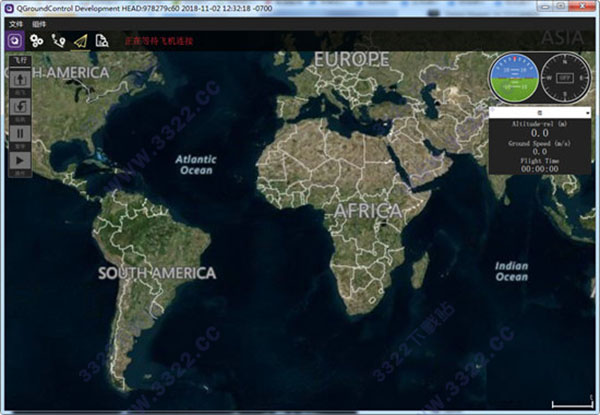
2、打开是这样的,选PX4,其实选哪个都差不多都能用。
3、飞控上电,等待飞控完全启动再链接USB.(PX4完全启动是蓝灯慢闪)。记得插SD卡(没有刷过固件的第一次使用QGC的以及要刷固件的直接跳过4.5步看7刷固件的步骤)
4、右上角选端口,波特率随便选,PX4/PIX自适应的.
5、连接完成后2.03版本的QCG会检查SD卡的参数,然后会卡死一会……..正确的链接是这样的,姿态会解算出来.
6、以上的是刷好固件的PX4/PIX正确链接.
7、固件的下载和刷新:按小编提供的画红圈的地方,然后会检测到你的板子(以前版本QGC一定要在飞控没链接地面站之前刷固件,新版的随便搞).
8、检测到你的飞控版本会这样,然后选第一个,按UPGRADE然后等一会就行了,期间要电脑连网下固件!
9、等下面的进度条到100% 提示Succeeded!就是刷好了,然后飞控会自己重启连电脑的。
二、第一次使用设置方法
1、按照红圈的地方点设置机型,图形的一目了然选完按右下角进行确认,然后飞控会重启。
2、传感器矫正:按我红圈的地方按。
第一个是地磁传感器矫正,按了然后按照那个8字晃动飞控就行了。
第二个陀螺仪的矫正,把飞控放好按了自己会完成的。
第三个是加速度传感器的矫正,按了会有飞机提示你怎么放,放对了方向保证一段时间会矫正下一个方向,进度条会自己动,方向感不好的多搞几次吧,这个有点麻烦,不要说矫正不了,是你方向搞不对。
3、遥控器行程矫正,按我圈的地方就行了,
我的控没开,开了控右边会有值,start就可以按了,然后按照英文提示一步步提示矫正。搞错一步全部重来!不能反回
更新日志
QGroundControl v2018.11.02更新:
1、操作简单快捷。
2、界面简洁清晰。
3、优化了部分程序。
4、修复bug。
计划
文件加载/保存计划文件加载的新模型,该模型与标准文件加载/保存/另存为用户模型匹配。
加载KML能够直接从“同步”菜单加载KML文件。如果需要,系统将提示您要从KML创建哪种类型的Pattern。
调查更好地支持不规则形状的多边形。
走廊扫描 - 创建遵循折线的飞行模式。例如,可用于调查道路。
固定翼着陆图案固定翼着陆模式
登陆区域在计划中直观地表示。
可以从车辆位置/航向复制着陆位置/航向。






















